(a)
(b)
Definitions and Geometry
prepared by:
Joseph Malkevitch
Department of Mathematics
York College (CUNY)
Jamaica, New York 11451
email:
malkevitch@york.cuny.edu
web page:
http://york.cuny.edu/~malk/
Introduction
Mathematics is a subject which is valued for its precision and objectivity, yet there are a variety of tensions in the way language is used within mathematics and people's perceptions of the role of "definition" in mathematics.
First, many words used in "ordinary English" are used in mathematics in more precise or technical ways than what people commonly understand by these words. Examples of such words are polygon, circle, and vertex.
Second, words that have been developed for use in mathematics often are stretched to new meanings as mathematics grows as part of the process of expanding mathematics' domain but with the price of confusion about the "real" meaning of these terms.
Third, phrases that are used over and over again are sometimes used in "imprecise ways" because what is meant is understood even though the phrase is confusing when looked at closely.
A good example of the third situation is the question: What is the area of a circle of radius r? This phrase, when looked at closely is imprecise in two ways. First, there are many kinds of circles: circles in the Euclidean plane, circles in the taxicab plane, etc. To be more clear, the type of circle being looked at should be specified. However, circles are typically defined as follows:
Given a distance function (say, Euclidean distance) a circle of radius r is the set of points whose distance from a fixed point C (the center of the circle) is r. With this definition a circle is, intuitively, the set of points in a piece of "wire." Wires have linear dimension but no area, so strictly speaking a circle has no area! What one is trying to ask for is the area of the region which is in the interior of a circle of radius r. For a Euclidean circle this area is πr2 where r is the radius of the circle and π is a special real number which is not the root of any algebraic equation whose infinite decimal representation begins 3. 14159.... The Euclidean circle has the property that if it is rotated about its center that distances between the center and points on the circle are preserved, however, for taxicab circles the situation is not so straight forward. The result is that a theory of area for taxicab regions does not align perfectly with that in the Euclidean plane.
So we will be thinking of a (Euclidean) circle as a piece of wire. If we want to include the points in the interior of the region enclosed by the circle we need another name for this. The usual names are either disk or 2-disk. (One can have a 2-disk on a surface other than the Euclidean plane; thus, one can have the interior of a small circle on the sphere, and this would also be a 2-disk.) The points which are the interior of a sphere in 3-dimensional space, or more generally an n-dimensional space. For "technical" reasons, it is traditional to call the sphere which sits in n-space as the (n-1)-sphere. (The reason is that the circle in 2-dimensions is "1-dimensional," while the surface of a sphere in 3-dimensions is 2-dimensional. (Sets of dimension one typically have a length but not an area; sets of dimension 2 typically have an area but not a volume, etc.) We can also refer to a circle together with its interior, and sometimes "abusing language" one can talk about a "circle" but it being understood one is talking about the wire together with the points in its interior.
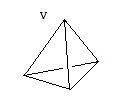
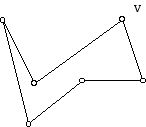
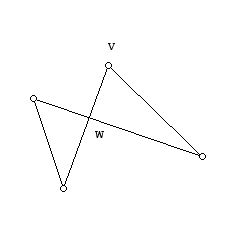
Typically, the same issue that comes up for circles and their interiors comes up with polygons and their interiors. It is usual to think of a polygon as a collection of rods (straight line segments in the Euclidean plane) where each pair of the rods meet at exactly one point. Figure 1 below shows polygons in (b) and (d) and the thick dark edges in (f) can be thought of as a polygon. We can also think of the diagram in Figure 1 (i) as a polygon. This type of polygon is called self-intersecting. While it is obvious impossible for rods to interpret each other in a plane as they are required to do at point w in Figure 1 (i) it is convenient to disregards this physical impossibility and continue to think of this as a polygon.
The vertex concept
Here, though, I would like to concentrate on the notation of a vertex of a geometrical object with the perspective of how this concept fits into a broad range of geometric phenomena.
Figure 1 shows a variety of geometrical sets. In each of these diagrams one point has been singled out to be labeled v. The letter v has been chosen as short for the word vertex. In each of these examples, the designated point can be considered as a vertex of the geometric set but what do all of these "vertices" have in common at the conceptual level?

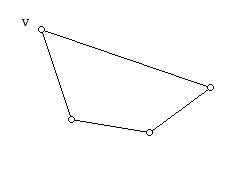
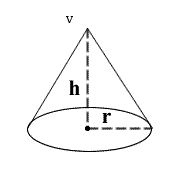
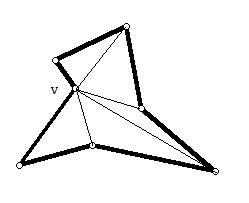
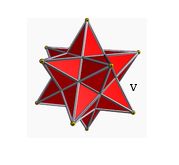
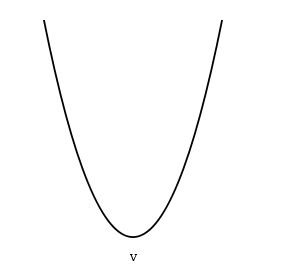
Perhaps it may not appear that vertex is a good term for all of these points labeled v, and yet, in mathematics, we do, indeed, refer to all of these points v as a vertex of the geometric object they are part of. The reason for the possible confusion here is that some of these geometrical objects are 2-dimensional and some are 1-dimensional, and some of them are three dimensional. Some of the figures are bounded and some of them are unbounded. Some of the figures are convex and some are non-convex. Some of the figures are polyhedral and some are not. There are ideas that involve combinatorial objects and metrical objects. Yet, it seems appropriate to use the word vertex for some of the points in each of these diagrams. So what is a vertex of a geometric set? What makes the issues here complex is not only the variety of objects that have vertices but the vast amount of terminology and concepts that are necessary to even talk about these objects.
To give an organized approach to some of these ideas let us begin with the idea of a convex set. The intuition here is that one is working in a geometric environment in which it makes sense to talk about lines and geodesics. In a geometric environment a geodesic between two points p and q is the shortest length "curve" that joins these two points. If one picks two points p and q on a Euclidean sphere which is embedded in 3-dimensional Euclidean space which are not the end points of a diameter of there sphere, there is a great circle C which includes p and q and the shorter of the two arcs of in C
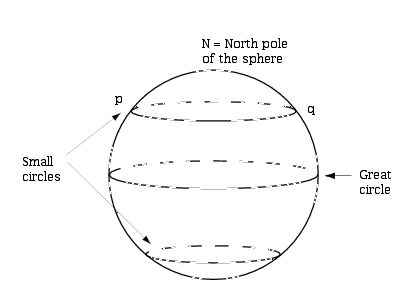
which join p and q (in Figure 2 this shortest path goes through the North pole of the sphere). Note that this geodesic is considered a "line" from the point of view of the axiomatics in developing the geometry of the sphere but is a curve from the point of view the sphere embedded in three space. Furthermore, there is a straight Euclidean line from p to q considered as points in 3-dimensional space. While the segment joining p and q is the shortest distance between p and q as points in 3-space, if we are considering ways to get between p and q on the surface of the sphere this line segment is not "relevant." On the surface of the sphere it may be tempting to believe that the route between p and q along the small circle shown in Figure 2 is the shortest distance between p and q. This is not true; the geodesic is the short arc of a great circle, in this case, as already noted the route that goes through the north pole. Thus, there is a big difference between distances between points measured on a surface and those that are measured between the points in the underlying space the surface sits in. So, for the discussion of convexity that follows, we are interested in objects sitting in a Euclidean space of either dimension 2 or 3.
Definition:
A set X is called convex if for any two points in X p and q the line segment joining p and q is also a subset of X.
Note that his definition means that the empty set as well as a set X consisting of a single point are convex. However, more importantly, the points that are common to two convex sets U and V, that is U » V, is also convex. In fact, the intersection of any collection of convex sets is convex.
Convexity is an extremely fruitful geometric concept, but it seems to have not been dealt with explicitly in ancient times. When a set Z is not convex there is a natural way to think of it as a subset of a "larger" set which is convex. This larger set is known as the convex hull of the set Z. In general, for any set Z, the convex hull of Z is the intersection of all convex sets which contain Z. This is well defined for Euclidean space since the whole space in which Z sits will be convex. The process of taking the convex hull of a set fills in any notches or holes that the original set may have had.