Reflex angles and Pre-College Research Problems in Geometry
prepared by:
Joseph Malkevitch
Department of Mathematics
York College (CUNY)
Jamaica, New York 11451
email:
malkevitch@york.cuny.edu
web page:
http://york.cuny.edu/~malk/
Here is an example of how to develop a series of mathematical concepts which helps young students understand ideas that are age appropriate for their grade, but which also leads to an "unsolved" problem. This activity could be aimed at students in the fifth grade or higher.
The concepts which could be involved include interior and exterior regions of a polygon, interior angle of a polygon, collinear points (points which lie on a line), convexity and non-convexity, angle measure, triangulation, reflex angle, and basic graph theory.
We will be interested in sets (collections) of points in the plane or points which are the vertices of polygons drawn in the plane where no three points lie on a line. Sometimes this condition is expressed by saying that the points are in general position. When you draw three points in a plane at "random" they will not usually lie on a line. Usually three points will form the vertices of a triangle.
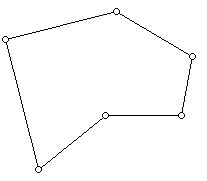
Figure 1 shows a non-convex polygon (see Appendix for words which may not be familiar to you, and ideas which extend the discussion in the text below) which has 6 sides. This polygon has only one reflex angle, that is, an interior angle which is greater than 180 degrees. For children it has one "notch."
Note we are not interested in self-intersecting polygons but in polygons which are simple, i.e., the edges of the polygon do not intersect themselves. Note that sometimes it is convenient to give names to the vertices of the polygon by assigning labels to the vertices. In Figure 2 the labels are the numbers 0, 1, 2, 3, 4. However, notice that the labels are not used in consecutive order. This polygon is an example of a self-intersecting pentagon. A polygon with three vertices is called a triangle, with 4 vertices a quadrilateral, with 7 vertices a heptagon. One can refer to a polygon with n vertices as an n-gon.
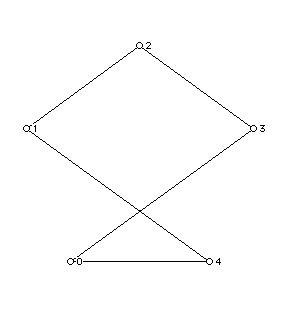
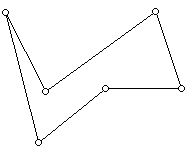
Figure 3 shows a second hexagon, a six-sided polygon. It has two notches, i.e., two reflex angles.
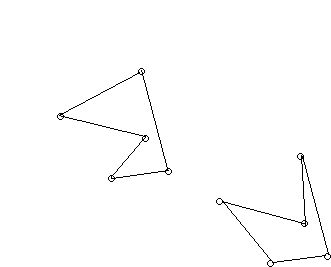
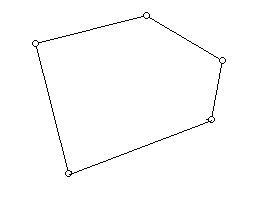
If one fixes a particular set of points in the plane, one can often draw several different polygons which connect up these points. For example, in Figure 4 there are two different polygons which have been used to connect the one set of points. The polygons are shown in different positions for clarity but we could draw these two different polygons on top of each other. When two point sets in "different places" have the property that one can be moved to lie exactly on top of the other set without changing the distances between the points in the collection, we say the point sets are congruent. These two polygons arise from two different ways of drawing polygons using the same set of points and are referred to as two different polygonalizations of the point set. A polygonalization of a set of points is a polygon whose vertices are the points in the set. As long as no three of the points lie on a straight line, then there is at least one polygon which goes through the points. (If one does not insist on dealing with sets of points or polygons with the property that no three points lie on the same line, then one can polygonalize any set of points which do not all lie on the same straight line.)
As one moves six points around in the plane so that no three of the points are collinear, one can pass a variety of different hexagons through them. These hexagons will generally differ in the number of reflex angles they can have.
For a particular polygon P, let r(P) denote the number of reflex angles that the polygon has. Thus, r(polygon in Figure 1) = 1, while r(polygon in Figure 3) = 2.
Now suppose S is a collection of points in the plane (no three on a line). r(S) is the smallest number of reflex angles in any way of drawing a simple polygon with its vertices at the points of S. Thus, in Figure 4 we see two different ways of drawing a polygon which goes through the same set of 5 points. Again, the drawings are in different places on the page, but we could have drawn the two polygons on top of each other because we used two congruent sets of points.
For the collection of points S in Figure 1, (used as the vertices of the polygon) no matter what polygon you draw through these 6 points one cannot get a polygon with less than one reflex angle. Thus, for this set r(S) = 1.
Now consider the collection of points T in Figure 5.
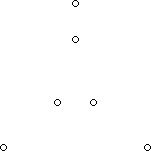
There are many different polygons which have this same set of points as its vertices. Some of these polygons have two reflex angles but some of them have only one. Hence, for T we have r(T) = 1.
Problem 1:
Can you find a set U of 6 points in the plane such that r(U) = 2?
Now, suppose that one picks a positive integer n. We will define r(n) to be the maximum value of r(S) for any plane set of n points, no 3 collinear.
r(3) = 0 since there can be no reflex angle in any polygonalization of three points. When n = 4 there are some sets of 4 points for which the only polygonalizations are convex polygons; however, there are some sets of 4 points for which, no matter what polygonalization one chooses, there must be at least 1 reflex angle.
Problem 2:
a. Draw a set W of 4 points in the plane for which r(W) = 1.
b. Draw a set X of 5 points in the plane for which r(X) = 1.
c. Are you able to find a set Y of 5 points in the plane for which r(Y) = 2?
How does the value of r(n) change as n changes?
Problem 3:
a. By filling in the entries of the table below, perhaps you can make a good guess as to how r(n) changes with n.
|
n |
3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| r(n) | 0 | 1 |
Note: To show that r(n) cannot be more than t, finding an example of a point set Q with n elements such that there is a polygonalization of Q which has t reflex angles suffices. However, to prove that r(n) is actually equal to t requires a proof that there can no point set Q with n points so that all polygonalizations of Q have fewer than t reflex angles. This is often not so easy.
b. For each n from 3 to 10 draw a polygon which shows the value for r(n) that you entered into the table can't be larger than the value you show.
Hint: r(10) =3.
Problem 4:
For each of the polygons that you draw in your answer to Problem 3, how many points are on the polygon that forms the boundary of the convex hull of these polygons?
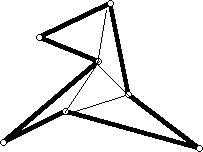
A concept that may have some relation to the idea of reflex angles concerns being able to draw diagonals of a polygon so that one decomposes the interior of the polygon into triangular regions. Although it is intuitively clear that a plane simple polygon can be subdivided into triangles using its diagonals, it is not that simple to prove this fact. However, given any particular polygon it is not that hard to carry out the triangulation. In Figure 14 we have a 7-gon outlined with thick line segments. In Figure 15 we have indicated with the diagonal lines drawn shown as thin lines a way to subdivide the polygon in Figure 14 into triangles. Figure 16 shows a different triangulation of the polygon in Figure 14. One way to see that these triangulations of the same polygon cannot be the same is to notice that all the diagonals used in creating the triangulation in Figure 16 emanate from a single vertex, while the diagonals that subdivide Figure 15 into triangles do not all share a single vertex. In general, there may be many triangulations of a polygon. In particular, for a polygon with at least 4 sides which is convex one can always subdivide it into triangles in several ways.
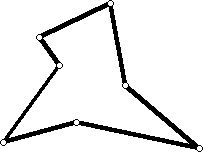
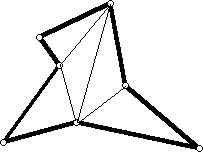
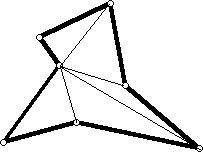
Figure 17 shows a heptagon which is not congruent to the one in Figure 14. One way to see this is that this polygon has only one triangulation! This triangulation is shown in Figure 18.
Since convex polygons always have many triangulations while polygons with many reflex vertices can have one or several different ways to triangulate the polygon, there may be some way to get insight into the number of reflex angles for a polygon and the number of triangulations that the polygon can have.
Problem 5:
a. How many different triangulations does the 7-gon in Figure 14 have?
b. How many different triangulations can a convex 7-gon have?
c. For each number of reflex angles that a 7-gon can have, what are the largest and smallest number of triangulations the polygon can have?
The polygon in Figure 17 has the property that if one is located at any of the three vertices which do not have a diagonal at them in Figure 18, then one can not join any of the three other vertices to these with a diagonal. This suggests that we can define the idea of one vertex being "visible" from another vertex for a polygon.
The concept of "visibility" for points within a polygon has very interesting and rich ramifications. Here I will just consider a minimal framework to get you thinking. Suppose v is a vertex of a plane simple polygon. A point w in the interior of the polygon or in its boundary will be called visible from v if the line segment vw contains no points from the exterior of the polygon.
The visibility set from a vertex v of polygon P is the set of points of V that are visible from v.
Problem 6:
a. Is the visibility set of a polygon from any vertex always a polygon?
b. If P is convex, what is the visibility set from each vertex of P?
c. Find the visibility set for each vertex of the polygon in Figure 17.
When one answers a question for all polygons, it is often interesting to ask the same question for equilateral polygons, i.e., polygons all of whose edges have the same lengths.
Problem 7:
a. Figure 3 is a hexagon with two reflex angles. Can you find an equilateral hexagon with two reflex angles?
b. If a polygon P has n sides and r reflex angles, can one always find a polygon P* with n sides and r reflex angles which is equilateral?
Appendix:
Collected here are some intuitions, definitions and results which may be helpful and/or shed light on the above ideas. Notice the complex combination of "common parlance" words we use when we do mathematics as well as works that are used with a technical meaning. What makes things hard (for teachers and students) is that the technical definitions that the same word is given in the mathematics world differ from book to book and source to source. We are accustomed to this variation in meaning for everyday words, but it may come as a surprise that a subject which is viewed as special because of its "precision" suffers similar difficulties to those of other subjects.
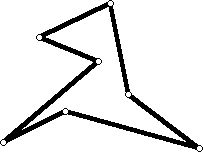
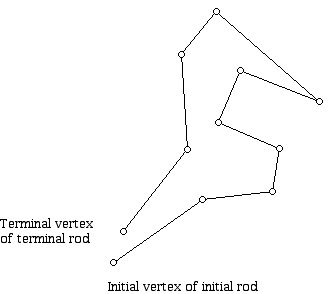
What is a polygon? There have been many definitions and approaches to defining polygons. Intuitively, a polygon is a collection of rods joined up at their endpoints so that each stick has two endpoints where the terminal end of the first stick is joined to the initial end of the next stick. We then require that the terminal end of the last stick in the "path" be joined to the initial end of the first stick, as shown below just before the "joining" occurs.
One can think of these sticks as being in 3-dimensional space or lying in a plane. Even though this cannot happen physically, we can think of the sticks as "crossing" each other as in Figure 2. These are self-intersecting polygons.
Here, we will restrict our attention to polygons in the plane and think of polygons as graphs. Intuitively, a graph is a geometric diagram consisting of dots called vertices, and line segments (which in a drawing may be curved or straight) called edges (Figure 7).
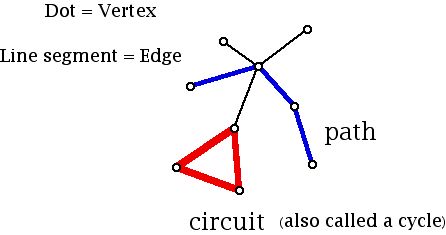
A graph is connected if one can travel from any vertex to any other vertex along edges of the graph. The degree or valence of a vertex in a graph is the number of edges that meet at that vertex. In Figure 7 the vertices have valence 1, 2, 3, or 5.
A cycle is a connected graph where every vertex has degree (valence) 2. The graphs in Figures 1-3 are all cycles.
A graph is planar if it is isomorphic (combinatorially equivalent) to a graph which can be drawn in the plane where edges meet only at vertices. In Figure 2 edges 1,4 (the edge with endpoints vertices 1 and 4; note, 1,4 is the same as 4,1) and 0, 3 cross (meet) at a point which is not a vertex. This graph is, however, planar because it is isomorphic (same structure) to a graph whose vertices sit at the corners of, say, a regular pentagon.
When a graph is drawn in the plane so that its edges meet only vertices, the graph is called plane. Note that the edges need not be drawn as straight lines, but they are required to meet only at vertices.
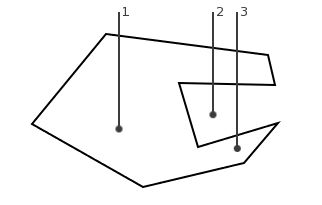
While viewing polygons from a "rods" point of view is very helpful, leading to such questions about the boundary length of the polygon, when thought of from this point of view polygons have no area. Hence, in many situations it is convenient to think of polygons as the "region" inside the rods, together with the rods, which form the "boundary" of the region. However, how does one tell if a point is inside a polygon from this point of view? Usually, it is not hard to tell using our vision system (eyes). Thus, you can probably easily tell which of the points labeled 1, 2, and 3 in Figure 8 are inside and which are outside of the polygon shown.
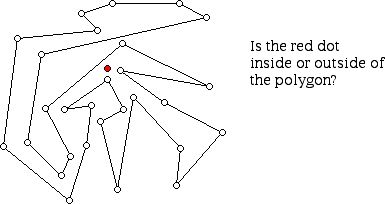
However, if the polygon is extremely convoluted, it may not be so easy for the eye to tell inside from outside, so there should be a more "mathematical" test for points which are inside the polygon and which are outside. For example, where is the red (isolated) dot (Figure 9)?
Issues of this kind relate to a fundamental theorem in topology known as the Jordan Curve Theorem. Intuitively, this theorem says that when one draws a simple closed curve C in the plane (in particular, the plane drawing of a cycle) then the points not on C are in either of two regions which can be called the interior and the exterior of the curve C. The exterior region goes off to "infinity" while the interior points are "bounded." (A set is bounded if one can enclose all its points in a circle with a fixed radius.) The nifty idea here is that if one picks a point in the plane that is not on the polygon and draws a ray from this point that goes off to infinity that avoids all the vertices of the polygon (which is easy to do because there are only a finite number of vertices), then one can count how many times this ray intersects the polygon. If the result is an odd number of intersections, the point you chose was an interior point If the ray cuts the polygon an even number of times, then the point is an exterior point!
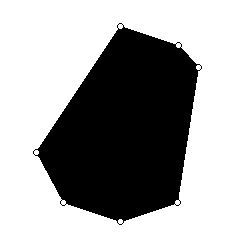
One of the very fundamental but relatively recent concepts in geometry is that of convexity. Though in ancient Greece they studied objects that today we would call non-convex, there is no explicit attention given to convexity as a concept. A set X is convex if given any two points p and q in the set X the line segment joining p and q is also in X. By this definition a rod version of any polygon is non-convex. We can deal with this by talking about the convexity or lack of it for a simple polygon together with its interior. For example, the polygon in Figures 1, 3, 4, and 9 are non-convex. An example of a convex polygon is shown in Figure 10. The interior points of the polygon appear in black.
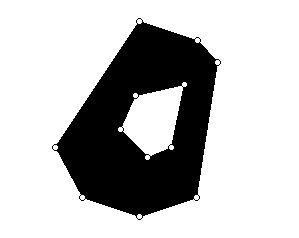
There are two intuitive reasons why point sets might fail to be convex. One is that the polygon has a notch (Figure 1) and the second is that it has a "hole." Thus, the diagram in Figure 11, which shows in black the region between between a 7-gon and a 5-gon, is not convex. Note that the black region is not considered to be a polygon. Sometimes the region between two "curves" is called an annulus, while some authors reserve this term for the region between two circles which have a common center.
Another extremely convenient and important idea is that of the convex hull. The intuitive idea is that if X is not convex, one wants to find a "smallest" convex set of which X is a subset and which is convex. Since the intersection of two convex sets is convex (note we take the empty set to be convex), we can define ch(X) the convex hull of X to be the intersection all convex sets that contain X.
Figure 12 shows, filled in using black, the points which must be added to the non-convex polygon in Figure 1 to form the convex hull of the polygon shown there.
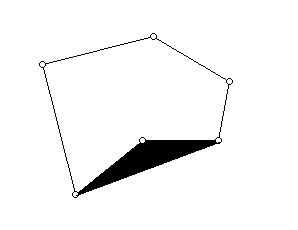
Figure 13 shows the rod version of the polygon whose convex hull is the polygon in Figure 1, i.e., the convex hull of Figure 1 consists of all the points of the polygon in Figure 13 and the points in its interior. You should verify that the convex hull of the polygon in Figure 9 is a polygon with 9 vertices. If one has a set of n points, no 3 on a line in the plane, the convex hull of this set can have anywhere from 3 points to n points.
References:
There are papers that address the particular unsolved problem that is discussed here. However, to encourage you to have the pleasure of exploring this problem on your own for a while, I will hold off providing these references. Similarly, there is a huge literature about polygons in the mathematics and computer science literature.